
NASA-funded Robotic Sub Makes Final Dive To Reach Bottom of Earth’s Deepest Sinkhole
May 14, 2007

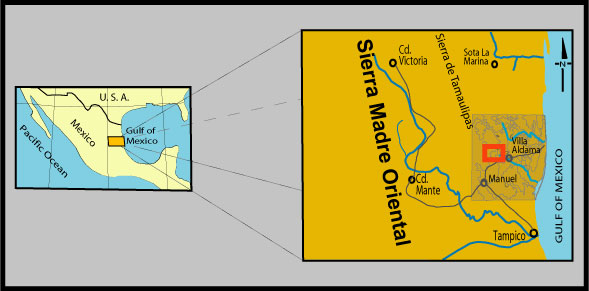
Scientists this week begin the final leg of a five-year, NASA-funded mission to reach the bottom of Cenote Zacatón in Mexico, the world’s deepest known sinkhole.
No one has ever reached bottom and at least one diver has died in the attempt. Scientists want to learn more about Cenote Zacatón’s physical dimensions, the geothermal vents that feed it and the forms of life that exist in its murky depths.
Previous expeditions tested the robotic probe that will make the dive. The Deep Phreatic Thermal Explorer, known as DEPTHX, is a tangerine-shaped submarine designed to survey and explore for life in extreme regions on Earth and potentially in outer space. During eight years of research at Zacatón, doctoral student Marcus Gary, who coordinates the DEPTHX mission, and hydrogeology professor Jack Sharp, both from The University of Texas at Austin’s Jackson School of Geosciences, discovered the system’s unusual hydrothermal nature is analogous to liquid oceans under the icy surface of Jupiter’s moon Europa.
Technology developed to explore the sinkholes could be applied to future space probes of Europa, where scientists believe that deep cracks and holes in the ice offer a chance of finding extraterrestrial life.

The DEPTHX technology has also been approved for a new NASA mission to explore one of Antarctica’s ice-bound polar lakes. Researchers believe ice-bound lakes hold clues to the origins of life on Earth.
William Stone of Stone Aerospace in Del Valle, Texas, is principal investigator on the project. The research team also includes robotics experts, engineers, geobiologists and geochemists from Carnegie Mellon University’s Robotics Institute, Colorado School of Mines, Southwest Research Institute and Mexico’s Universidad Autonama de Nuevo Leon and Universidad del Noreste.
Unique in the world of robotic explorers, DEPTHX is autonomous. The probe does not rely on instructions from humans to decide where to go or what to do. Using software developed by Carnegie Mellon graduate student Nathaniel Fairfield, DEPTHX creates 3D maps of previously unexplored areas as it swims along and then uses those same maps to navigate back to the surface.
The mission’s progress can be monitored at two Web sites: geology.com, where a science writer from The University of Texas at Austin’s Jackson School of Geosciences will maintain a daily blog of the mission beginning May 16, and the CMU Robotics Institute’s DEPTHX Web site, which will feature daily updates, images and graphics beginning May 15.
Also See:
Video: This Week @ NASA
How Low Can Geologists Go? (Marc Airhart’s blog posts for Geology.com, May 2007)
Stone Aerospace’s DepthX page
Carnegie Mellon University’s DepthX page
Dispatches from Zacaton (Marc Airhart’s blog posts for the Houston Chronicle’s SciGuy blog, March 2007)
- Preparing for a journey into the unknown (March 08)
- Clock is ticking for DEPTHX team (March 10)
- The Goat Head Theater (March 11)
- Hands-on science (March 12)
- Oh my darling — vehicle lost! (March 14)